

In a groundbreaking collaboration, researchers from the Massachusetts Institute of Technology and Stanford University have unveiled the Compositional Diffusion Continuous Constraint Solver (Diffusion-CCSP). This innovative model is set to redefine the landscape of robotic reasoning and planning, offering a comprehensive solution to continuous constraint satisfaction problems (CCSP).
A New Era in Robotic Planning
Robotic manipulation planning, a cornerstone of modern robotics, often grapples with the challenge of selecting continuous values that adhere to intricate geometric and physical constraints. Traditional methods have been limited, using separate samplers for each constraint type. The Diffusion-CCSP model, however, offers a holistic approach, representing CCSPs as factor graphs and combining the energies of diffusion models trained for individual constraint types.
Harnessing the Power of Constraint Graphs
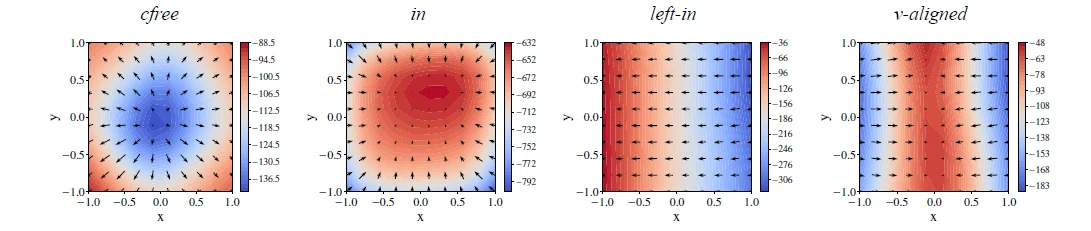
The Diffusion-CCSP model’s strength lies in its utilization of constraint graphs, a unified framework for specifying CCSPs. By learning diffusion models for individual constraint types and recombining them for new problem instances, the model showcases unparalleled flexibility in both training and inference.
Impressive Evaluations Across Domains
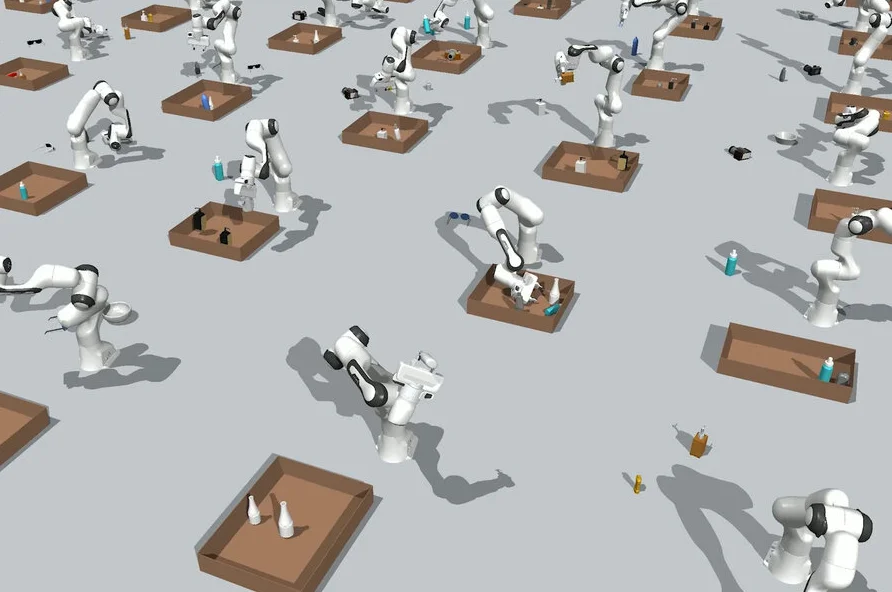
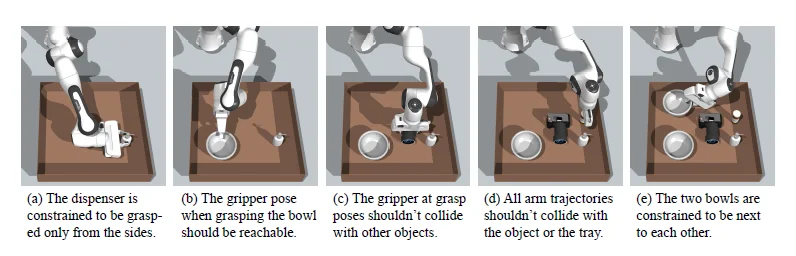
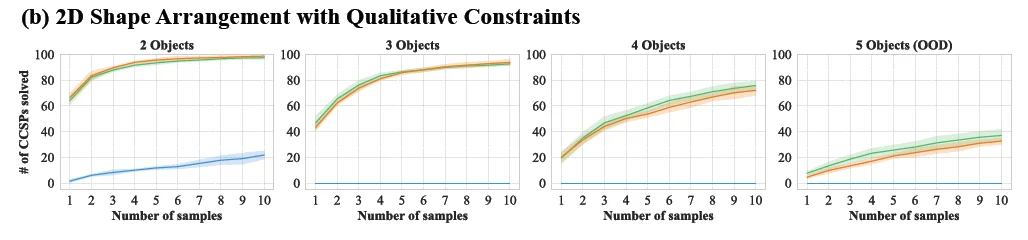
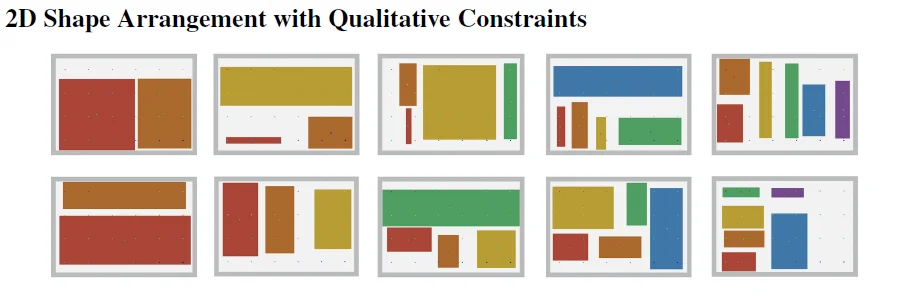
The model’s versatility is evident in its evaluations across various domains. From 2D triangle dense-packing and 2D shape arrangement with qualitative constraints to 3D shape stacking with stability constraints and 3D object packing with robots, Diffusion-CCSP has consistently demonstrated its efficacy.
Building on a Legacy of Research
While the Diffusion-CCSP model is a novel introduction, it stands on the shoulders of giants. The research draws inspiration from existing work in geometric rearrangement, compositional generative modeling, and task and motion planning (TAMP). However, the team’s approach distinguishes itself with its adaptability and capacity to address a broader spectrum of constraints.
A Comprehensive Approach to Robotic Manipulation
The Compositional Diffusion-Based Continuous Constraint Solver is more than just a model; it’s a testament to the rapid advancements in robotic reasoning. By providing a graph-based representation of CCSPs that unifies various geometric, physical, and qualitative constraints, it offers a solution that’s both comprehensive and efficient.
Looking Ahead To Robotic Reasoning Model
With the diffusion-CCSP model’s introduction, the robotic planning horizon is expanding. As robots become increasingly integrated into our daily lives, models like Diffusion-CCSP will be instrumental in ensuring they operate precisely and efficiently. The research community and industries await with bated breath to see this pioneering model’s real-world applications and further developments.
For those keen on delving deeper into the intricacies of this research, the entire document, replete with detailed explanations, evaluations, and visual representations, is available on arXiv.